
 Bilibili
Bilibili机器人的现代数学知识(Lie Groups)
参考:
paper: A micro Lie theory for state estimation in robotics
lib: manif
lib: sophus
book:《Modern Robotics Mechanics, Planning, and Control》Kevin M. Lynch, Frank C. Park (讲解视频) book:《机器人学的现代数学理论基础》丁希仑
videos: 南科大
1 基础知识
frame (physics) coordinate systems (mathematics)
自由向量(free vector)
- geometric quantity with length and direction
无坐标的(coordinate free)
- $p$ denotes a point in the physical space
- A point $p$ can be represented by a vector from frame origin to $p$
- ${}^Ap$ denotes the coordinates of point $p$ wrt frame $A$
- When left-superscript is not present, it means the physical vector itself or the coordinates of the vector for which the reference frame is clear from the context.
反对称矩阵(skew-symmetric) \(w=[w_1,w_2,w_3]^T\)
\[[w]= \begin{bmatrix} 0 & -w_3 & w_2 \\ w_3 & 0 & -w_1 \\ -w_2 & w_1 & 0 \end{bmatrix}\] \[[w]=-[w]^T\]$[w]$ is called a skew-symmetric matrix representation of the vector $w$
有的也用 $\hat{w}$ 表示 skew-symmetric
$a \times b = [a]b$: cross product 本质上对后面这个vector进行了一个线性变换
旋转矩阵(Rotation Matrix) Frame: 3 coordinate vectors(unit length) $\hat{x}, \hat{y}, \hat{z}$ and an origin
- $\hat{x}, \hat{y}, \hat{z}$ mutually orthogonal
- $\hat{x} \times \hat{y} = \hat{z}$, right hand rule
Rotation matrix: specifies orientation of one frame relative to another
\[{}^AR_B = [{}^A\hat{x}_B, {}^A\hat{y}_B, {}^A\hat{z}_B]\]where, ${}^A\hat{x}_B$ 是$\hat{x}_B$在A frame下的coordinate
\[R \in \mathbb{R}^{3 \times 3}\]Properties:
\[R^TR^{-1} =I\] \[R^{-1} = R^T\]根据后面李群的知识:\(R \in SO(3)\)
齐次变换矩阵
\[T=(R,p) \in \mathbb{R}^{4 \times 4}\]根据后面李群的知识:\(T \in SE(3)\)
欧式空间、非欧空间
- 欧式空间:距离、面积、体积等
- 非欧空间:黎曼几何、曲率等
角速度(angular velocity) \(w= \hat{w} \dot{\theta}\)
$\hat{w}$ 表示单位转轴(unit vector),$\dot{\theta}$表示角速度(scalar)
2 群
问题:为什么会引入群这个概念? 回答:
看这个视频总结的
群是 一种集合 + 一种运算 的代数结构:记集合为$A$,运算为$\cdot$,当运算满足封闭性 Closure、结合率 Associativity、幺元 Identity element、逆 Inverse element四条性质,称$(A,\cdot)$为群
群的4个基本性质:封闭性、结合律、幺元律、可逆性
交换群(commutative group)、阿贝尔群(Abelian group)
- 旋转矩阵集合 + 矩阵乘法构成群 $\to$ 三维特殊正交群/旋转矩阵群$SO(3)$
- 变换矩阵集合 + 矩阵乘法构成群 $\to$ 三维特殊欧式群/变换矩阵群$SE(3)$
- 常见的其他群
- 一般线形群$GL(n,\mathbb{R})$: $n\times n$的可逆(非奇异)实矩阵(二元运算:矩阵乘法),也可以记作: $GL(n)$
- 特殊正交群$SO(n)$: $n\times n$的单位正交实数矩阵(二元运算:矩阵乘法),$SO(2)$、$SO(3)$是两个比较重要的子群。
- 特殊欧式群$SE(n)$: 三维特殊正交群$SO(3)$和向量空间$\mathbb{R}^3$的半直积为特殊欧式群$SE(3)$: $SE(3)=SE(3)\otimes \mathbb{R}^3$,$SE(3)$也是特殊欧式群的一个子群。
3 李群
3.1 李群
李群:群的4个基本性质+3个特殊条件(可微流形、群的积是可微分的映射、群的逆也是可微分的映射)
一般意义的李群指的的乘法,不是加法。即矩阵李群。
典型例子:
- $n$维向量空间 $\mathbb{R}^n$
- 单模复数群 $z = \cos\theta + i\sin\theta$
- 一般线性群 $GL(n,\mathbb{R})$ - $n\times n$ 非奇异实数矩阵
- 正交群 $O(3)$ - $n\times n$ 正交实数矩阵
- 特殊正交群 $SO(n)$ - $n\times n$ 单位正交实数矩阵
- 三维旋转群 $SO(3)$
- 三维特殊欧式群 $SE(3)$
- 幺模群
- 特殊幺模群
3.1 李子群
组合运算 composition
-
直积direct product
-
半直积semi-direct product
交运算 intersection
- 李子群的交集还是李子群
商运算 quotient
4 李代数
4.1 李代数
李代数对应李群的正切空间,它描述了李群局部的导数。
李群:大写,例如$SE(3)$,$SO(3)$ 李代数:小写,例如$se(3)$,$so(3)$
- $SE(3)$的李代数是$se(3)$
- $SO(3)$的李代数是$so(3)$
李群表示刚体运动、李代数表示刚体运动速度,李群和李代数是指数映射关系。
4.2 指数映射
4.3 伴随表达
5 李括号
6 总结
6.1 SE(3)、SO(3)、se(3)、so(3)
1、$3 \times 3$ 旋转矩阵组成的集合称为特殊正交群(special orthogonal group)$SO(3)$
- 特殊正交群$SO(3)$称为旋转矩阵群
- 特殊正交群$SO(2)$是所有$2 \times 2$实数矩阵的集合,二维的
2、特殊欧氏群(special Euclidean group)$SE(3) $,称为刚体运动群、齐次变换矩阵(homogeneous transformation matrice)群
刚体的位形空间可以表示为$SO(3)$与$\mathbb{R}^3$的乘积空间(半直积)记作$SE(3)$
\[SE(3) = SO(3) \otimes \mathbb{R}^3\]3、大写是李群、小写是李代数;他们之间是指数映射的关系;如下面两个exp的关系;
针对刚体运动,无论齐次坐标表达,还是伴随表达,都是具有指数映射关系$A=e^{\theta S}$;$Ad(g)=e^{\theta ad(j)}$
4、 所有$3 \times 3$反对称矩阵的集合称为$so(3)$,$so(3)$是三维旋转群的李代数 For any unit vector $[\hat w] \in so(3)$ and any $\theta \in \mathbb{R}$ \(e^{[\hat w]\theta} \in SO(3)\)
For any $R \in SO(3)$,there exists $[\hat w] \in \mathbb{R^3}$ with $||\hat w||=1$ and $\theta \in \mathbb R$ such that \(R=e^{[\hat w]\theta}\)
\[exp:[\hat w]\theta \in so(3) \to R \in SO(3)\] \[log:R \in SO(3) \to [\hat w]\theta \in so(3)\]The vector $\hat w\theta \in \mathbb{R^3}$ is called the exponential coordinate for $R$
import packages.Python.modern_robotics.core as mr
import numpy as np
from scipy.linalg import expm, logm
R = np.array([[0, -1, 0], [1, 0, 0], [0, 0, 1]])
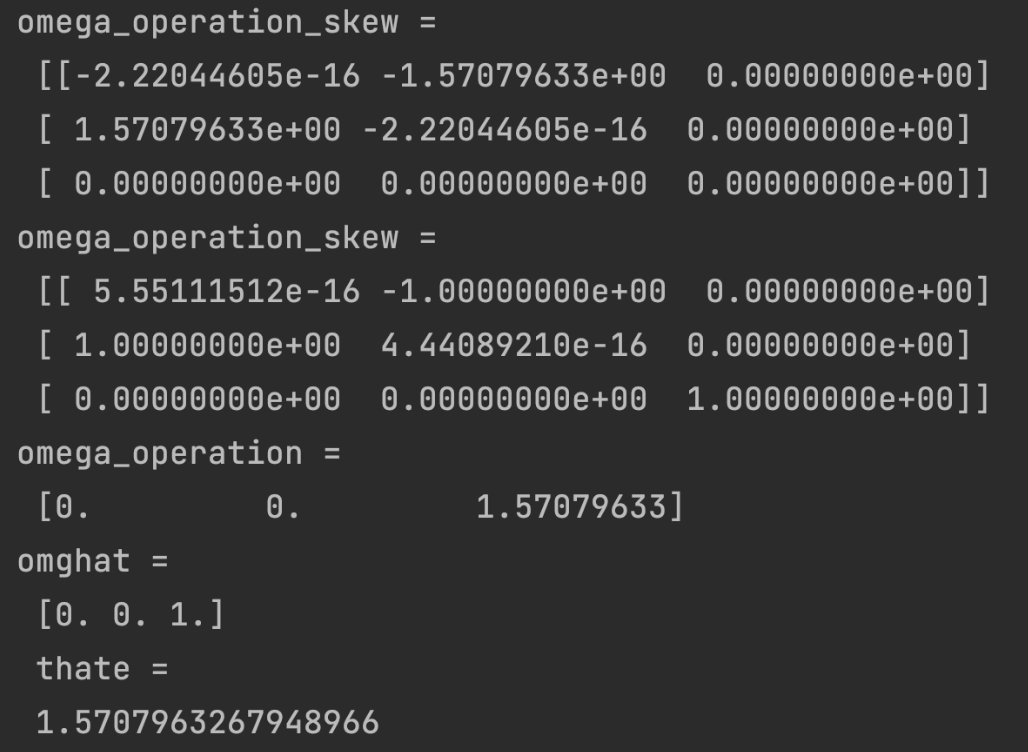
omega_operation_skew = logm(R)
print('omega_operation_skew = \n', omega_operation_skew)
R_test = expm(omega_operation_skew)
print('omega_operation_skew = \n', R_test)
omega_operation = mr.so3ToVec(omega_operation_skew)
print('omega_operation = \n', omega_operation)
omghat, thate = mr.AxisAng3(omega_operation)
print('omghat = \n', omghat, '\n', 'thate = \n', thate)
结果如下所示:
Rodrigues’Formula: Given any unit $[\hat w] \in so(3)$,we have \(e^{[\hat{w}\theta]} = I + [\hat{w}]sin(\theta)+ [\hat{w}]^2(1-cos(\theta))\)
证明:将指数按照幂级数展开,再结合$sin(\theta)$和$cos(\theta)$的展开,化简。
刚体运动的指数坐标
\[exp:[\mathcal{S}]\theta \in se(3) \to T \in SE(3)\] \[log:T \in SE(3) \to [\mathcal{S}]\theta \in se(3)\]矩阵指数$e^{\mathcal{S} \theta}$
\[e^{[\mathcal{S}]\theta} = \begin{bmatrix} e^{[w]\theta} & G(\theta)v\\ 0 & 1 \end{bmatrix}\] \[G(\theta)=I\theta+(1-cos\theta)[w]+(\theta -sin\theta)[w]^2\]import packages.Python.modern_robotics.core as mr
import numpy as np
from scipy.linalg import expm, logm
np.set_printoptions(suppress=True)
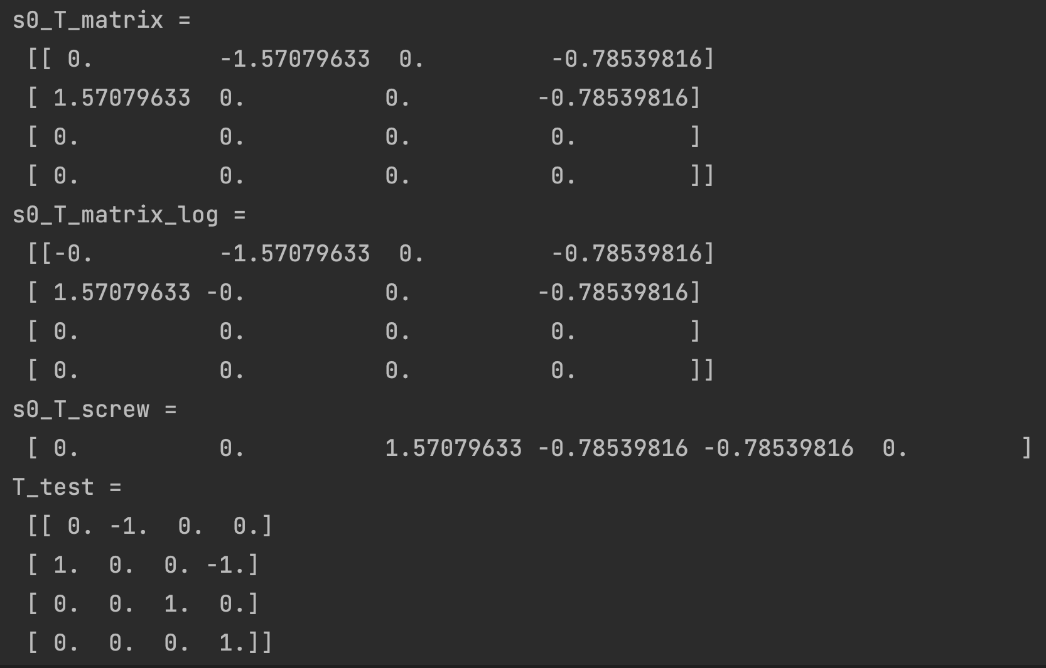
T = np.array([[0, -1, 0, 0], [1, 0, 0, -1], [0, 0, 1, 0], [0, 0, 0, 1]])
s0_T_matrix = mr.MatrixLog6(T)
print('s0_T_matrix = \n', s0_T_matrix)
s0_T_matrix_log = logm(T)
print('s0_T_matrix_log = \n', s0_T_matrix_log)
s0_T_screw = mr.se3ToVec(s0_T_matrix) # 得到Twist
print('s0_T_screw = \n', s0_T_screw)
T_test = expm(s0_T_matrix)
print('T_test = \n', T_test)
结果如下:
6.2 不同表达、不同运算
不同表达对应不同的运算,各有各的好处。
伴随表达也具有指数映射的关系$Ad(j)=e^{\theta ad(j)}$
- 3×3表达的旋转运动的李群$T$和其对应的李代数
- 齐次坐标表达的刚体运动的李群$T$和其对应的李代数
\[T^{-1} = \begin{bmatrix} R^T & -R^Tp \\ 0 & 1 \end{bmatrix}\]
- 伴随表达(adjoint rspresentation)的刚体运动的李群$Ad_T$和对应的李代数
$Ad_T$ 也可以表示成 $Ad(g)$
7、旋量理论与机器人运动学
所有的刚体运动都可以用螺旋运动表示。
旋量是一条有节距的直线;当节距=0,旋量$\to$线矢量。
7.1、齐次坐标与线矢量
点的齐次表示
面的齐次表示
线的齐次表示
Plucker坐标
线几何(线矢量):
线矢量(line vector):依附在空间某一直线上的向量(p29,戴建生)
\[S=(s;s_0)=(s;r\times s)=(L,M,N;P,Q,R)\]$s$称为原部矢量,$s_0$称为偶部矢量
线矢量,点乘没有意义;不过可以计算代数和、互易积(reciprocal product)
7.2、旋量、螺旋运动
- 如果是4×4表达,利用共轭运算conjunction,可以进行刚体变换:$T = T_2T_1T_2^{-1}$
- 如果是伴随表达,即4×4,共轭运算和伴随表达是等价的,即:
Twist / Spatial vector(运动旋量)、screw motion(螺旋运动)
\[\mathcal{V}_b = \begin{bmatrix} w_b \\ v_b \end{bmatrix}\] \[\mathcal{V}' = [Ad_T]\mathcal{V}\]运动旋量写成矩阵的形式 \([\mathcal{V}_b] = \begin{bmatrix} [w_b] & v_b \\ 0 & 0 \end{bmatrix} \in se(3)\)
运动旋量 $\mathcal{V}$ 可以写成螺旋轴(screw axis)$\mathcal{S}$与绕该轴转动的速度的组合形式
1、Consider “unit velocity” $\mathcal{V} = \mathcal{S}$
2、if not unit speed $\mathcal{V} = \mathcal{S}\dot \theta$
3、$\mathcal{V} = ScrewToTwist(\hat w,h,q,\dot \theta)=ScrewToTwist(\hat w,h,q,\dot \theta=1)\dot \theta$
screw motion \(\mathcal{V} = [w;v]=[\hat{s}\dot{\theta};-\hat{s}\dot{\theta}\times q+h\hat{s}\dot{\theta}]=[-w \times q+hw]\)
7.3、Forward Kinematics
参考:
calculation of the configuration(pose) $T=(R,p)$ of the end-effector frame from joint variables $\theta =(\theta_1,…,\theta_n)$
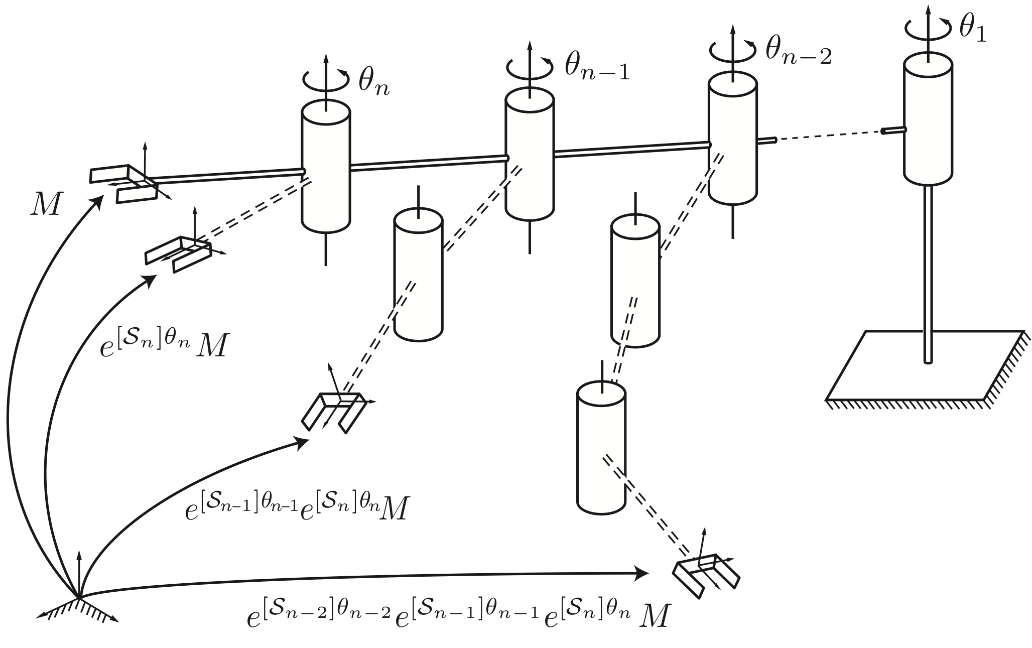
PoE(Product of Exponential)Formula \(T_{sb}(\theta_1,...,\theta_n)=e^{[^{0}\mathcal{S}_1]\theta_1} e^{[^{0}\mathcal{S}_2]\theta_2} ... e^{[^{0}\mathcal{S}_n]\theta_n}M\)
1、所有$\theta = 0$,计算初始$M$ 2、从后往前,转动最后一个关节,其余关节为0 3、继续转动倒数第二关节,其余关节为0 4、。。。 5、按照screw motion计算,在计算PoE公式
步骤:
- 建立坐标系(基坐标系${S}$,工具坐标系${T}$),只需要这两个坐标系,其他关节确定关节轴线或者移动方向即可。
- 计算$\theta_1 = …=\theta_n=0$时的初始位形,基坐标系与工具坐标系的$M$的变换${}_T^S{g(0)}$
- 计算$w_i$,
- 关节轴线上的一个点,所以那个$r_i$并不固定,但是不影响计算结果。
- 计算单位运动旋量$\xi_i=[w_i,r_i\times w_i]^T$(转动副),$\xi_i=[0, v_i]^T$(移动副)
- 根据公式:$e^{\theta \hat\xi} = \begin{bmatrix}
e^{\theta \hat w} & ({I}-e^{\theta \hat w})(w \times v) + \theta ww^Tv
0 & 1 \end{bmatrix}$,$w \neq 0$ - ${}_T^S{g(\theta)}=e^{\theta_1 \hat\xi_1} e^{\theta_2 \hat\xi_2} \dots e^{\theta_i \hat\xi_i} \dots e^{\theta_n \hat\xi_n} {}_T^S{g(0)}$
7.4、练习题
2自由度机器人(RR)
- P53
平面3自由度机器人(RRR)
- P55
空间3自由度机器人(RRR)
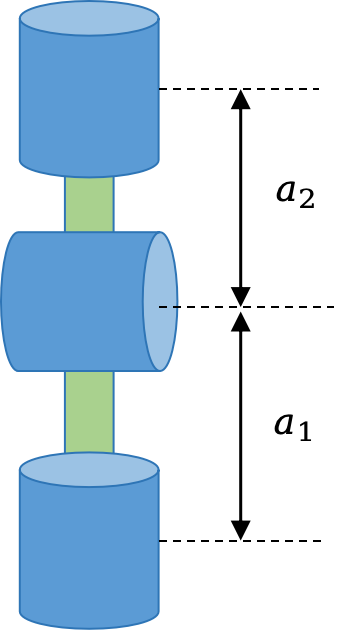
解
- 建立如下图所示的坐标系
- SCARA机器人(RRRP)
- P56
6自由度机器人(RRRRRR)
8、Inverse Kinematics
解析解的几种方法
9、Velocity Kinematics
deriving the Jacobian matrix:linearized map from the joint velocities $\dot \theta$ to the spatial velocity $\mathcal{V}$ of the end-effector
1、(重点) 空间雅可比(space Jacobian),$J_s(\theta)$,简单理解为基于基坐标系的,或张巍老师讲的情况。 公式如下: \(J_s(\theta)=\)
2、物体雅可比(body Jacobian),$J_b(\theta)$,末端(物体)坐标形式下的雅可比矩阵。
10、Dynamics
11、旋量系、互异旋量系、运动旋量系、约束旋量系、等效运动副旋量系。。。
这部分内容偏机构学中的分析方法。