
 Bilibili
Bilibili封面
前言:之前写过一篇类似的内容,但是现在发现有点问题,所以在重新分析一下(有详细代码)
1、目的
学习pinocchio库,利用它计算以及验证雅可比矩阵,和matlab机器人工具箱、mujoco等进行了对比分析
2、配置
2.1、电脑系统
芯片(Apple M1 Pro),MacOS(Sequoia 15.1.1)
别的平台也大差不差
2.2、pinocchio
就是一个机器人动力学的库,参考这个下载安装,选择适合自己的平台安装。我选择使用python版本,利用这个命令安装conda install pinocchio -c conda-forge。版本如下:

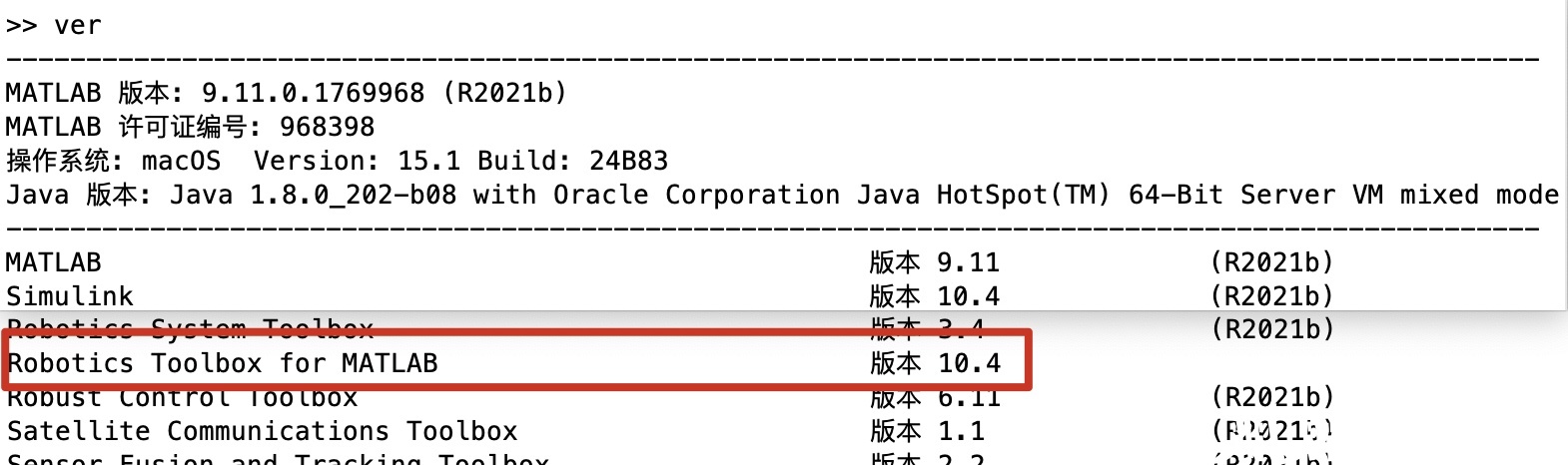
2.3、matlab机器人工具箱
之前做过一个10.4版本的教程;也做过9.10版本系列的教程。
本次验证使用的是10.4版本,如下:
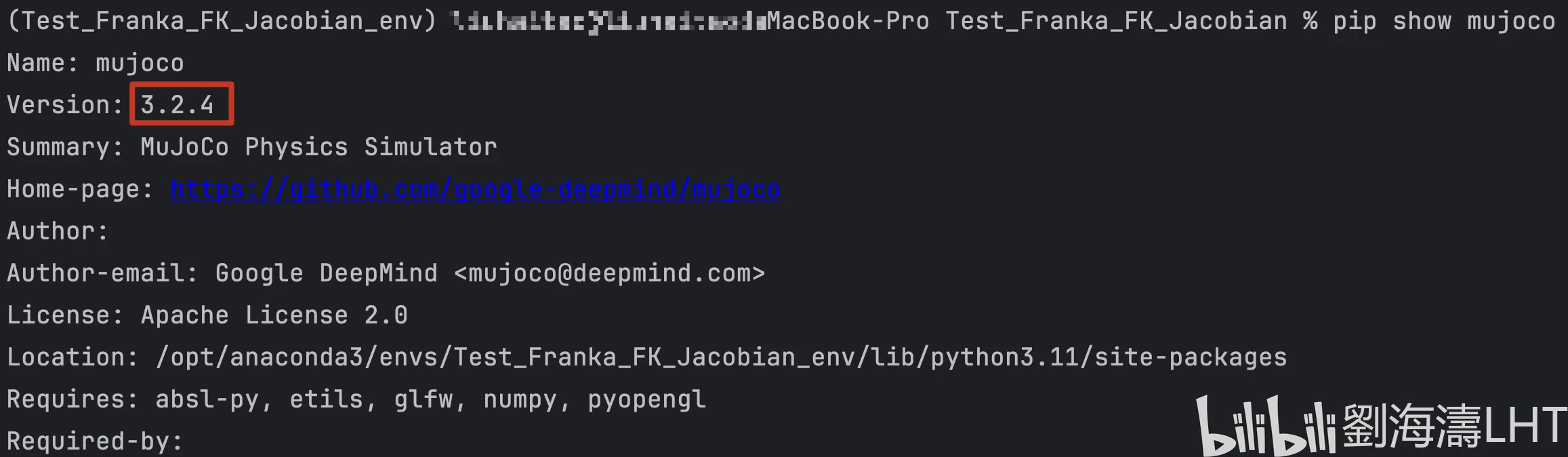
2.4、Mujoco
mujoco是一个仿真环境(目前也在学习,后续也打算出教程哦~),利用python版本,使用pip install mujoco进行安装,版本如下:
3、计算7自由度机器人(Franka)的FK、Jacobian
首先,本教程有一个配套的工程,工程文件目录如下

然后,都设置关节角度为q = [0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7],利用不同的库或者工具,分别计算Franka机器人的正运动学和雅可比矩阵。
3.1、pinocchio
利用pinocchio库,计算关节角度q = [0.1,0.2,0.3,0.4,0.5,0.6,0.7]时的正运动学,微分运动学,代码片段:
pin.forwardKinematics(model, data, q)
pin.updateFramePlacements(model, data)
# 计算Flange的fk
Flange_pose = data.oMf[Flange_Id]
print("Flange_pose \n", Flange_pose)
# 计算jacobian,相对于local frame
Flange_Jaco_wrt_local = pin.computeFrameJacobian(model, data, q, Flange_Id, pin.LOCAL)
print("Flange_Jaco_wrt_local \n", Flange_Jaco_wrt_local)
# 计算jacobian,相对于世界坐标系
Flange_Jaco_wrt_world = pin.computeFrameJacobian(model, data, q, Flange_Id, pin.WORLD)
print("Flange_Jaco_wrt_world \n", Flange_Jaco_wrt_world)
# 计算jacobian,相对于世界坐标系
Flange_Jaco_wrt_local_world = pin.computeFrameJacobian(model, data, q, Flange_Id, pin.LOCAL_WORLD_ALIGNED)
print("Flange_Jaco_wrt_local_world \n", Flange_Jaco_wrt_local_world)
运行结果:
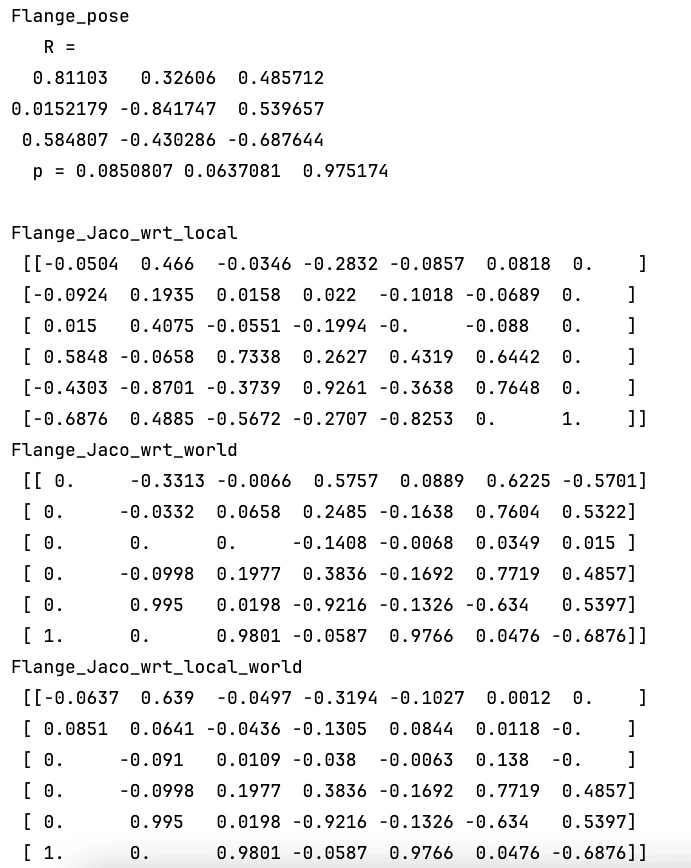
利用pinocchio.visualize import MeshcatVisualizer,可视化
3.2、Robotics Toolbox for Matlab
利用matlab机器人工具箱中的自带的franka panda模型mdl_panda,计算关节角度q = [0.1,0.2,0.3,0.4,0.5,0.6,0.7]时的正运动学,微分运动学。代码片段:
% 直接调用matlab中的robotics toolbox的自带的panda,参数跟fr3是一样的
mdl_panda
% 一开始加载的panda机器人,有一个末端工具的位置,类似加上hand后的那个tcp
% 为了统一,都是按照flange的位置,所以tool的位置改成0.
panda.tool.t = [0;0;0];
% 设置关节角度
q = [0.1,0.2,0.3,0.4,0.5,0.6,0.7];
panda.plot(q);
% 计算fk
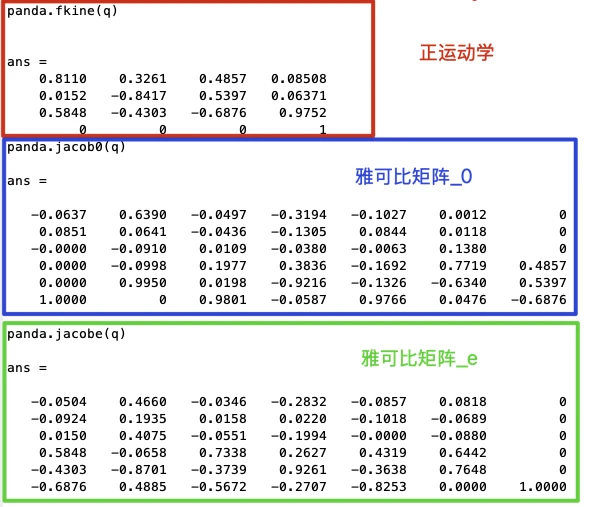
disp("panda.fkine(q)")
panda.fkine(q)
% 计算jacobian, with respect to the world frame
disp("panda.jacob0(q)")
panda.jacob0(q)
% 计算jacobian,with respect to the end effector frame
disp("panda.jacobe(q)")
panda.jacobe(q) % 在9版本是jacobn,在10版本中是jacobe
运行结果:
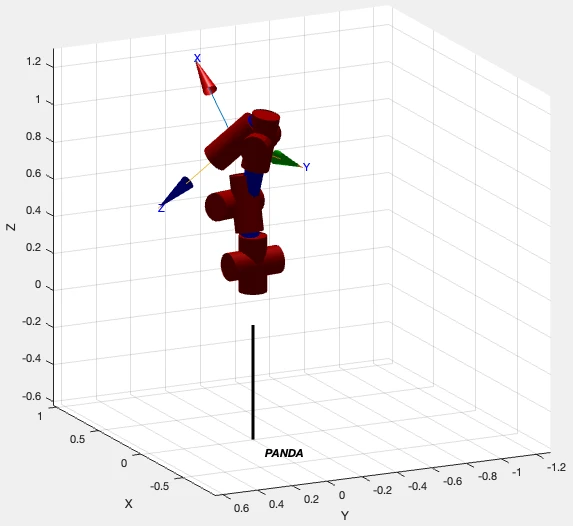
可视化:
利用matlab的机器人工具箱的Link、SerialLink函数,结合DH参数。在计算计算关节角度
q = [0.1,0.2,0.3,0.4,0.5,0.6,0.7]时的正运动学,微分运动学;结果跟上述保持一致。手算各个关节连杆之间的齐次旋转矩阵
T_01、xxx、T_67,然后相乘T_we = T_01*T_12*T_23*T_34*T_45*T_56*T_67;,计算正运动学,依旧跟上述保持一致
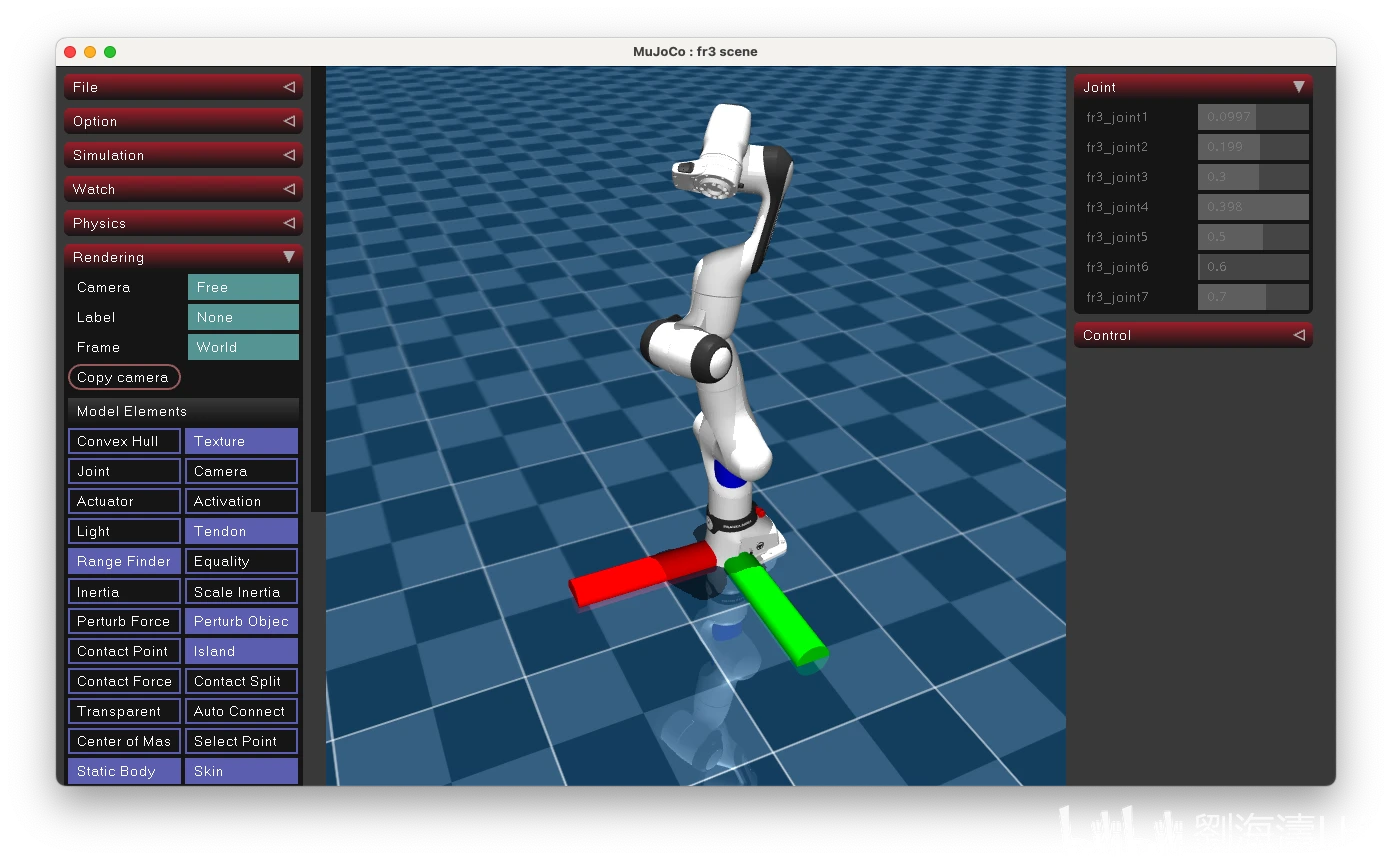
3.3、Mujoco
利用mujoco,计算关节角度q = [0.1,0.2,0.3,0.4,0.5,0.6,0.7]时的正运动学,微分运动学。代码片段:
# 获取末端法兰Flange的id,计算正运动学
Flange_site_id = m.site('attachment_site').id
Flange_site_pos = d.site_xpos[Flange_site_id]
Flange_site_rot = d.site_xmat[Flange_site_id].reshape(3, 3)
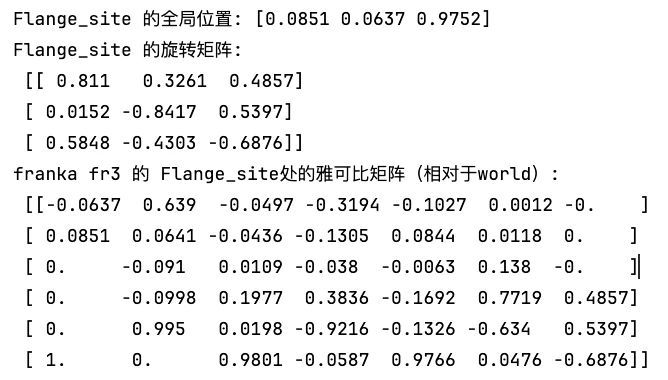
print("Flange_site 的全局位置:", Flange_site_pos)
print("Flange_site 的旋转矩阵:\n", Flange_site_rot)
# 计算末端法兰Flange的 Jacobian
Flange_site_jacp = np.zeros((3, m.nv))
Flange_site_jacr = np.zeros((3, m.nv))
mujoco.mj_jacSite(m, d, Flange_site_jacp, Flange_site_jacr, Flange_site_id)
Flange_site_jacobian = np.vstack((Flange_site_jacp, Flange_site_jacr))
print("franka fr3 的 Flange_site处的雅可比矩阵(相对于world): \n", Flange_site_jacobian)
运行结果:
利用mujoco.viewer,可视化:
注:目前Mujoco中好像只可以计算相对于world的雅可比矩阵(
mj_jacSite)。局部雅可比好像可以用mj_jac函数进行转换,后面在研究吧。
4、结果
总结一下三种方式得到的结果
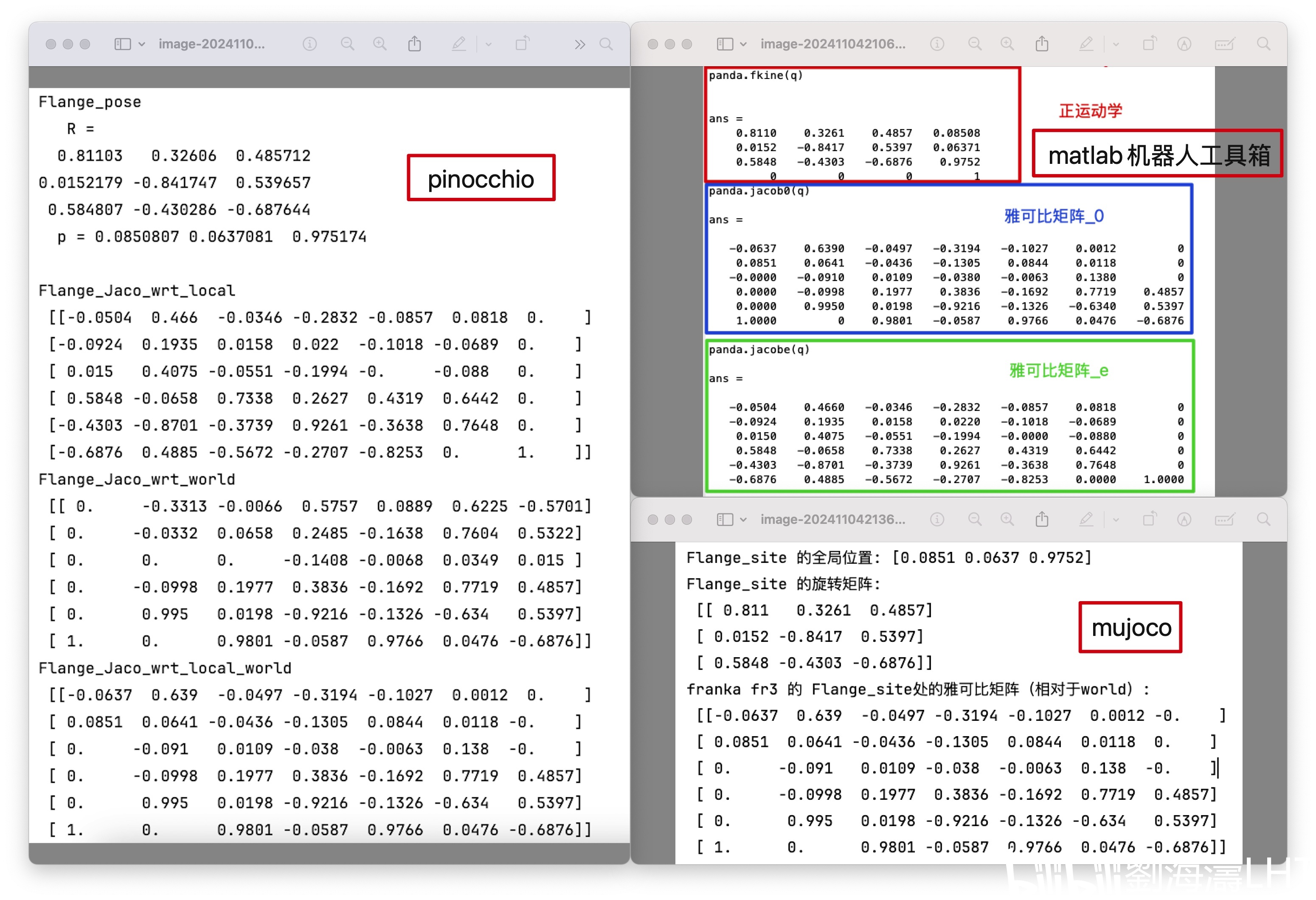
发现当关节角度为[0.1,0.2,0.3,0.4,0.5,0.6,0.7]时
1、他们的FK结果都是一样。
2、pinocchio中的LOCAL参考坐标系的结果和matlab机器人工具箱中的jacobe(相对于当前局部坐标系)的结果是一致的。
3、pinocchio中的LOCAL_WORLD_ALIGNED参考坐标系结果和我理解的相对于世界坐标系(matlab机器人工具箱中的jacob0,mujoco中的mj_jacSite)的结束是一致的。
5、疑问
计算相对于世界坐标系的时候,感觉应该是pinocchio中的WORLD参考坐标系和matlab的jacob0、mujoco的mj_jacSite保持一样?但是计算WORLD,结果又很奇怪?
在pinocchio的官网中,有三个参考系的描述:
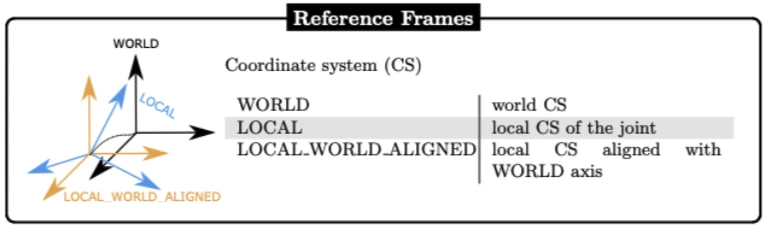
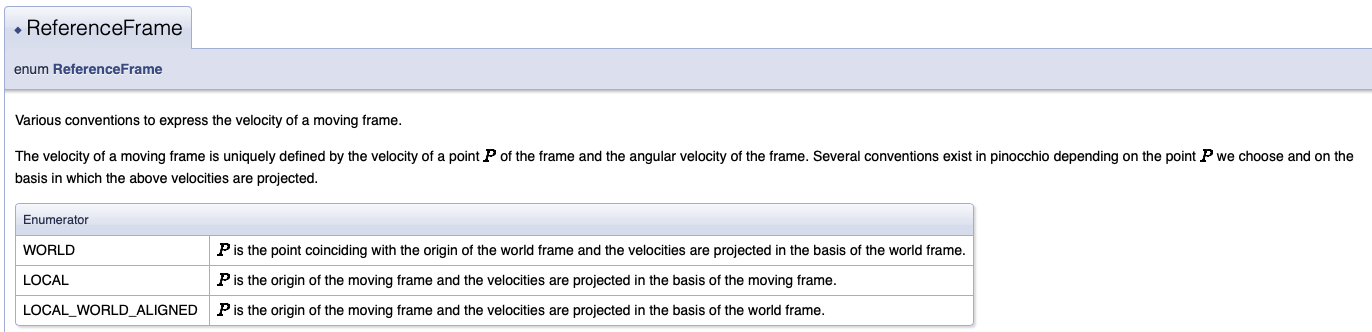
总感觉pinocchio中LOCAL和LOCAL_WORLD_ALIGNED表反了???
(欢迎大家讨论)
解决
参考这个。好像又理解了一点。2024.11.11
2024.11.13
有了一点心得感悟,感觉就是world好像是随着关节的变化,所进行移动,好像是这种感觉,但是在pinocchio中进行可视化,想直接显示这三个world、local、local_eorld_aligned。没事成功
后续尝试一下,Flange_Id在这三个位姿下的不同效果。就行比较。